Warum die Planung des öffentlichen Nahverkehrs mit EV anders ist
Das weltweite Bestreben, die Abhängigkeit von fossilen Brennstoffen zu verringern, und die daraus resultierenden politischen Maßnahmen haben die Verkehrsbetriebe dazu veranlasst, Diesel- und Erdgasflotten durch Elektrofahrzeuge (EVs) zu ersetzen. Die hohen Kapitalkosten von EVs stellen eine bedeutende Hürde für die Unternehmen dar, doch die erfolgreiche Einführung von EVs ist viel komplizierter als der Kauf neuer Busse.
Aufgrund der begrenzten Reichweite der Akkus müssen Busse bei Strecken, die länger als die Reichweite sind, den ganzen Tag über aufgeladen werden, und die Planer müssen zumindest eine Ladestrategie entwickeln, die mit der verfügbaren Infrastruktur kompatibel ist. Dies stellt den Planungs- und Zeitplanungsprozess vor neue Herausforderungen. Da eine suboptimale Wiederaufladung die Gefahr birgt, dass die Anzahl der für das Funktionieren eines Fahrplans erforderlichen Fahrzeuge steigt (und damit die Betriebskosten erhöht), ist die Optimierung der Ladevorgänge von entscheidender Bedeutung, um wirtschaftlich tragfähige Lösungen für den Elektrotransport zu schaffen.
Die Entscheidung, wann, wo und wie lange Elektrofahrzeuge aufgeladen werden sollen, hängt von mehreren Variablen ab:
- Strompreisgestaltung
Da die Strompreisgestaltung im Laufe des Tages variiert, viel mehr als bei Diesel oder Erdgas, ist die Ausnutzung von Zeiten geringer Nachfrage (und damit niedriger Kosten) der Schlüssel zur Minimierung der Betriebskosten. - Verfügbare Ladeinfrastruktur
Die Verfügbarkeit von Gebühren im Depot und bei Gelegenheit (d. h. unterwegs) variiert von Unternehmen zu Unternehmen. Folglich müssen die Anfahrt zu den Ladegeräten (über eine Leerfahrt) und die Kapazität dieser Ladeinfrastruktur berücksichtigt werden. - Ladebedarf der gesamten Flotte
Disponenten müssen berücksichtigen, wann andere Fahrzeuge geladen werden. Wenn zu viele Fahrzeuge zugleich geladen werden, können die Unternehmen gezwungen sein, zusätzliche Dieselbusse einzusetzen, um die vorübergehend außer Betrieb befindlichen Elektrofahrzeuge zu auszugleichen.
Das Hinzufügen dieser neuen Parameter zur Fahrzeugplanung macht die Verwendung eines Optimierungstools umso notwendiger, aber vielen Dispositionsplattformen fehlt die algorithmische Möglichkeit, EVs zu unterstützen. Glücklicherweise stellt sich eine neue Generation von Planungs- und Dispositionssoftware diesen Problemen.
Visualisierung der algorithmischen Komplexität
Schauen wir uns die algorithmische Komplexität der Optimierung von Ladevorgängen an.
Wir können ein Verkehrssystem als ein Netzwerk möglicher Verbindungen zwischen kompatiblen Fahrten modellieren (deren Zeiten sich nicht überschneiden, die vom gleichen Fahrzeugtyp sind und daher vom selben Fahrzeug gefahren werden können). In Wirklichkeit sind Verkehrssysteme viel komplexer, aber um uns ein grundlegendes Verständnis der algorithmischen Komplexität zu geben, können wir dieses vereinfachte Modell verwenden:
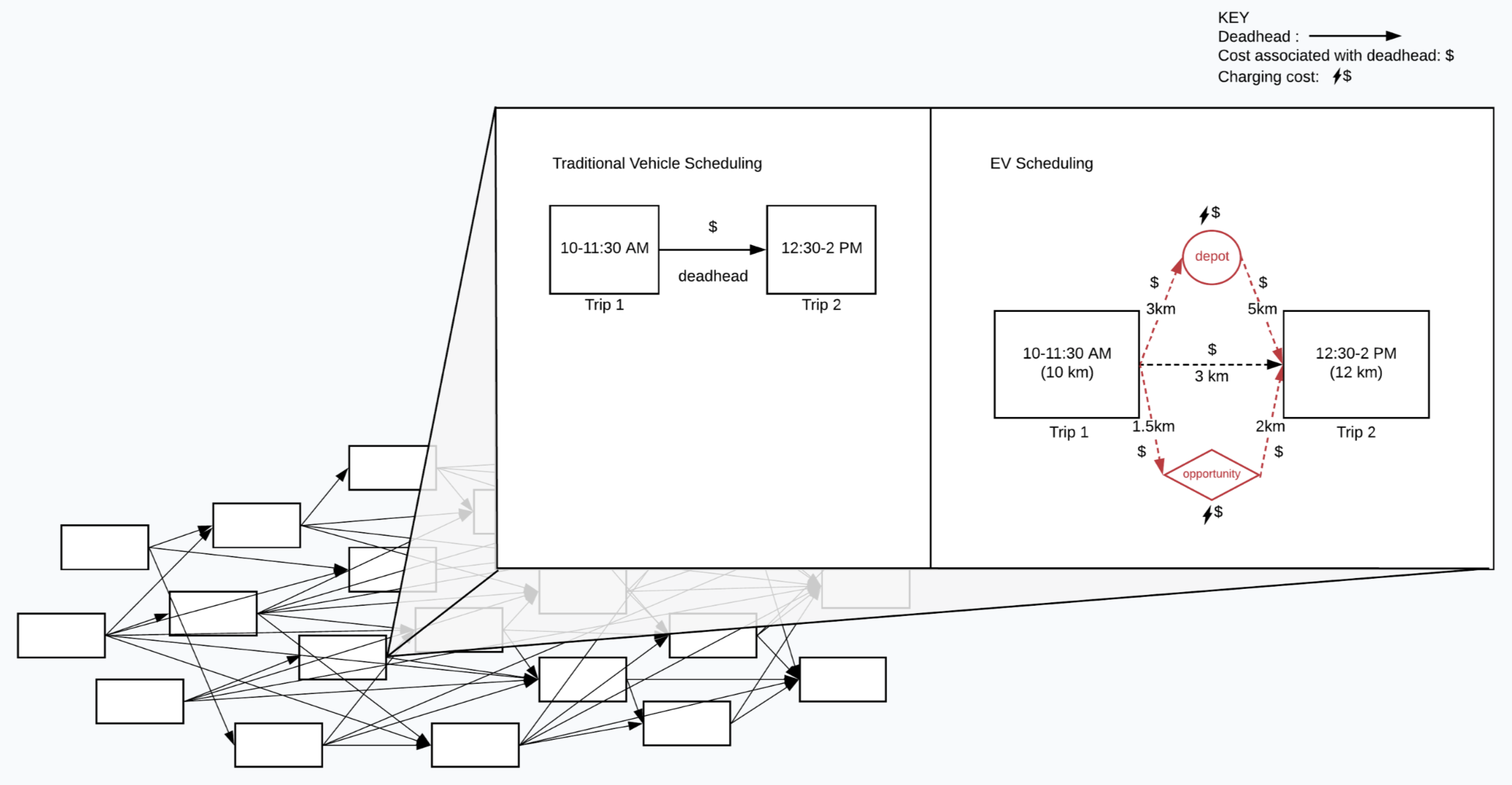
Wenn wir die Verbindung zwischen zwei kompatiblen Fahrten genauer ansehen, können wir sehen, was die Optimierung der EV-Disposition so schwierig macht.
Bei herkömmlichen Fahrzeugen haben wir nur eine Option, um zwei kompatible Fahrten zu verbinden: eine Leerfahrt. Unser Ziel bei der Optimierung des Fahrplans mit herkömmlichen Bussen ist es daher, alle Fahrten mit der geringstmöglichen Anzahl von Bussen zu verbinden und gleichzeitig die Leerfahrtkosten zu minimieren. Die Durchführung dieser Optimierung unter den Bedingungen unternehmensspezifischer Regeln und Präferenzen führt zu Blöcken und Dienstplänen mit maximaler betrieblicher Effizienz.
Mehr Optionen bedeuten einen größeren Suchraum
Das Elektrofahrzeug-Szenario gibt uns ein viel komplizierteres Modell. Das liegt daran, dass es möglicherweise mehr als eine Möglichkeit zur Verbindung von zwei Fahrten gibt. In unserem Beispiel stehen für jede Verbindung drei Optionen zur Verfügung: Sofortige Übergang einer Leerfahrt an die nächste Route, Laden an der nächstgelegenen Ladestation (mit Leerfahrten vor und nach dem Ladevorgang) oder Laden an der nächstgelegenen Gelegenheits-Ladestation (möglicherweise mit Leerfahrten) vor und nach dem Ladevorgang, je nachdem, ob das Gelegenheits-Ladegerät an der Route liegt). Wir wollen nun den Spitzenbedarf der Fahrzeuge, die Leerfahrtkosten und die Ladekosten (Strom- und Zeitkosten) durch zwei neue Einschränkungen minimieren: Jeder Bus muss ausreichend geladen sein, um seine Fahrten abzuschließen, und es gibt eine begrenzte Anzahl von Ladestationen, die gleichzeitig verwendet werden können. Da diese Einschränkungen das gesamte System und nicht nur eine Verbindung zwischen zwei Auslösungen betreffen, sind erweiterte Algorithmen erforderlich, um sie zu unterstützen.
In diesem Beispiel betrachten wir nur eine mögliche Verbindung zwischen zwei Fahrten. Praktisch gibt es für ein vollständiges Fahrtensystem Millionen davon. Für ein reales Szenario von 500 Service-Fahrten könnten alle möglichen Kombinationen dieser Verbindungen ohne die Lademöglichkeiten zu einem algorithmischen Suchraum von über 2^65 (ca. 69⋅10^19) möglichen Blöcken führen, aus denen ausgewählt werden kann. Wenn wir die für die EV-Optimierung erforderlichen Lademöglichkeiten hinzufügen, wird nicht nur der Suchraum viel größer, sondern es ändert sich auch die optimale Art der Sortierung, was die Komplexität des Problems erhöht. Das liegt daran, dass wir jetzt nicht realisierbare Fahrzeuge in unserem Suchraum haben (die zuvor mit der herkömmlichen Planung realisierbar waren) und es daher keine einfache algorithmische Möglichkeit gibt, den Suchraum auszuschöpfen. Somit beginnt die Suchraumgröße herkömmliche algorithmische Fähigkeiten zur effizienten Lösung des Problems zu beeinflussen.
Die erfolgreiche Einführung von EVs im öffentlichen Nahverkehr hängt von unserer Fähigkeit ab, die uns zur Verfügung stehenden Ressourcen zu optimieren und uns gleichzeitig nach den neuen Einschränkungen zu richten, die durch die Ladeanforderungen entstehen. Wenn wir dies mit Hilfe von fortschrittlichen Algorithmen tun, können wir einen öffentlichen Verkehr schaffen, der die Betriebseffizienz maximiert und gleichzeitig die Vorteile der Unabhängigkeit von fossilen Brennstoffen nutzt.